I am trying to aspirate using a Tecan EVO200 with fixed tips.
The tips is clearly submerged into the liquid so i think it is a software error.
I am trying to aspirate using a Tecan EVO200 with fixed tips.
The tips is clearly submerged into the liquid so i think it is a software error.
this error (error 9) was almost certainly returned by the machine. can you share the full traceback (a large part is missing in the screenshot) so we can see which method caused this error?
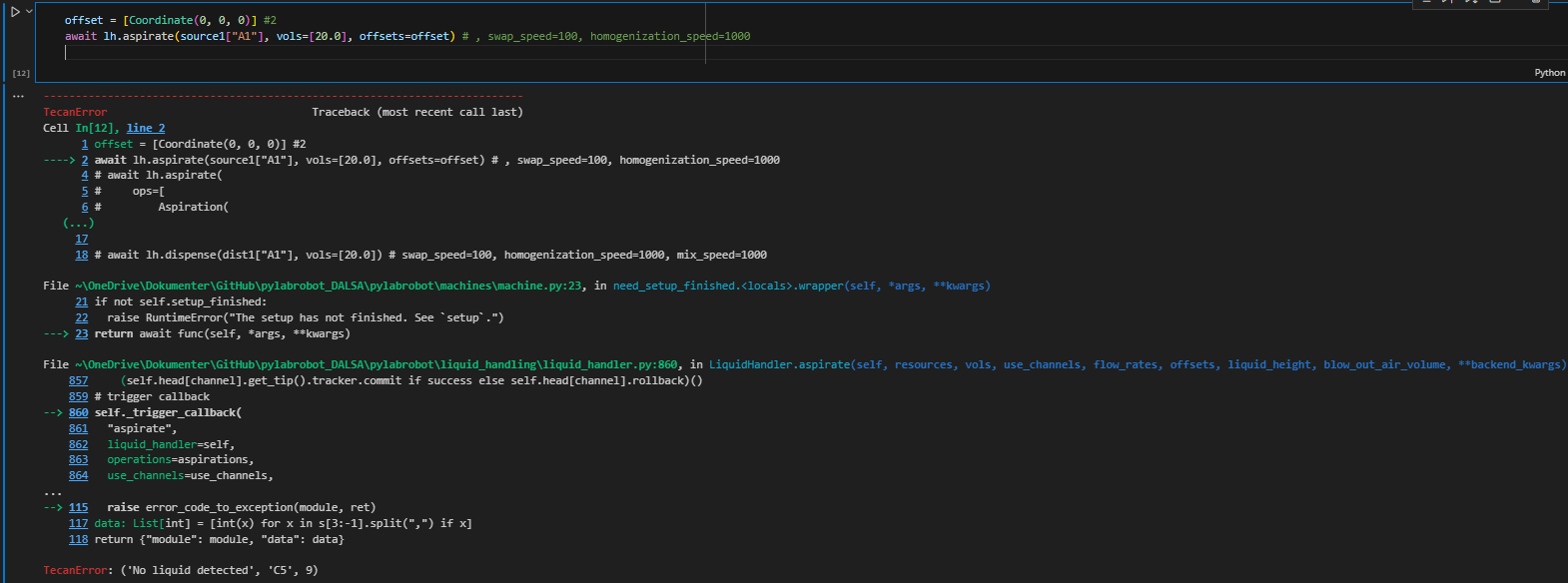
Full error:
TecanError Traceback (most recent call last)
Cell In[12], line 2
1 offset = [Coordinate(0, 0, 0)] #2
----> 2 await lh.aspirate(source1[“A1”], vols=[20.0], offsets=offset) # , swap_speed=100, homogenization_speed=1000
4 # await lh.aspirate(
5 # ops=[
6 # Aspiration(
(…)
17
18 # await lh.dispense(dist1[“A1”], vols=[20.0]) # swap_speed=100, homogenization_speed=1000, mix_speed=1000
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\machines\machine.py:23, in need_setup_finished..wrapper(self, *args, **kwargs)
21 if not self.setup_finished:
22 raise RuntimeError(“The setup has not finished. See setup.”)
—> 23 return await func(self, *args, **kwargs)
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\liquid_handling\liquid_handler.py:860, in LiquidHandler.aspirate(self, resources, vols, use_channels, flow_rates, offsets, liquid_height, blow_out_air_volume, **backend_kwargs)
857 (self.head[channel].get_tip().tracker.commit if success else self.head[channel].rollback)()
859 # trigger callback
→ 860 self._trigger_callback(
861 “aspirate”,
862 liquid_handler=self,
863 operations=aspirations,
864 use_channels=use_channels,
865 error=error,
866 **backend_kwargs,
867 )
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\liquid_handling\liquid_handler.py:1976, in LiquidHandler._trigger_callback(self, method_name, error, *args, **kwargs)
1974 callback(self, *args, error=error, **kwargs)
1975 elif error is not None:
→ 1976 raise error
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\liquid_handling\liquid_handler.py:843, in LiquidHandler.aspirate(self, resources, vols, use_channels, flow_rates, offsets, liquid_height, blow_out_air_volume, **backend_kwargs)
841 error: Optional[Exception] = None
842 try:
→ 843 await self.backend.aspirate(ops=aspirations, use_channels=use_channels, **backend_kwargs)
844 except Exception as e:
845 error = e
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\liquid_handling\backends\tecan\EVO.py:386, in EVO.aspirate(self, ops, use_channels)
384 shz = [min(z for z in z_positions[“travel”] if z)] * self.num_channels
385 await self.liha.set_z_travel_height(shz)
→ 386 await self.liha.move_detect_liquid(self._bin_use_channels(use_channels), zadd)
387 await self.liha.set_z_travel_height([self._z_range] * self.num_channels)
389 # aspirate + retract
390 # SSZ: z_add / (vol / asp_speed)
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\liquid_handling\backends\tecan\EVO.py:1029, in LiHa.move_detect_liquid(self, channels, zadd)
1020 async def move_detect_liquid(self, channels: int, zadd: List[Optional[int]]):
1021 “”“Move tip, detect liquid, submerge.
1022
1023 Args:
(…)
1026 must be between 0 and z-start - z-max
1027 “””
→ 1029 await self.backend.send_command(
1030 module=self.module,
1031 command=“MDT”,
1032 params=[channels] + [None] * 3 + zadd,
1033 )
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\liquid_handling\backends\tecan\EVO.py:157, in TecanLiquidHandler.send_command(self, module, command, params, write_timeout, read_timeout, wait)
154 return None
156 resp = self.read(timeout=read_timeout)
→ 157 return self.parse_response(resp)
File ~\OneDrive\Dokumenter\GitHub\pylabrobot_DALSA\pylabrobot\liquid_handling\backends\tecan\EVO.py:115, in TecanLiquidHandler.parse_response(self, resp)
113 ret = int(resp[3]) ^ (1 << 7)
114 if ret != 0:
→ 115 raise error_code_to_exception(module, ret)
117 data: List[int] = [int(x) for x in s[3:-1].split(“,”) if x]
118 return {“module”: module, “data”: data}
TecanError: (‘No liquid detected’, ‘C5’, 9)
it fails on await self.liha.move_detect_liquid(self._bin_use_channels(use_channels), zadd). this suggests the software is functioning as intended - the robot is just reporting there is no liquid. one thing i can think of: is the tip already submerged when this method is called, or is it still above the liquid?
does this issue also occur in evoware?