Hi,
I’ve gotten a bit further (thanks for the previous replies), but I ran into a quite specific issue. The machine has 7 plateholder locations and a chute, like so:
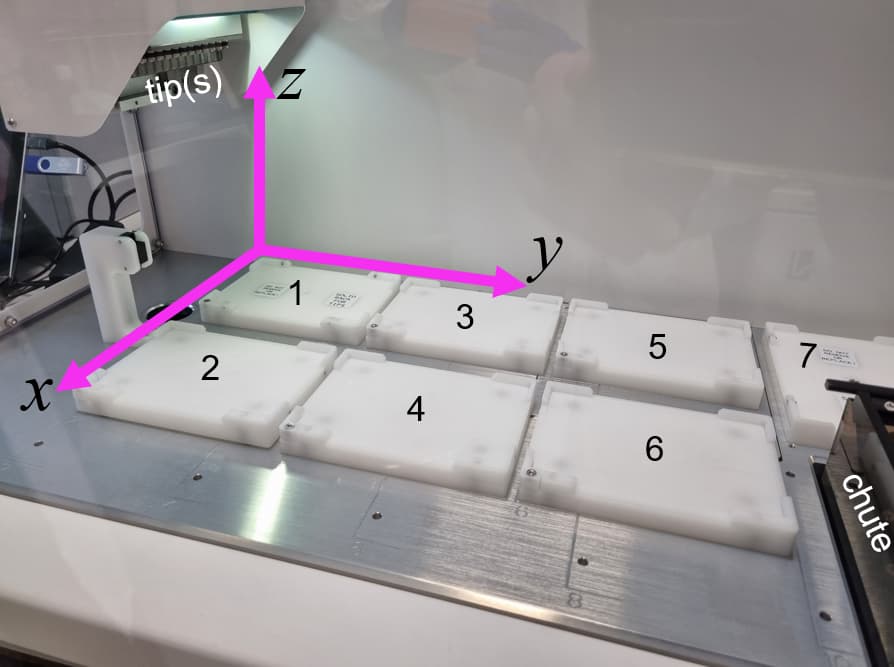
Two of these can hold a plate with tips (they’re not bouncy), stations 7 (top right portrait one) or 1 (top left landscape one).
Q1: x-axis is back to front, y-axis is left to right, z-azis is bottom to top - is that correct?
Q2: How do I set up a suitable tip-plate?
I am trying to pick up a tip from a Plate on a PlateHolder as follows
lh.pick_up_tips( tipplate["A1"], )
where the tipplate is an actual plate. This results in an error, as it expects TipSpots, not Wells on a Plate
TypeError: Resources must be TipSpots, got [Well(name=plate_07_well_0_0, location=(009.600, 070.000, 001.200), size_x=8.0, size_y=8.0, size_z=42.0, category=well)]
Since the backend I have written exports to CSV, I only need to tell it to pick up a tip from a location (plate#,wellid) and it does not matter what I pick it up from, as the machine takes care of that…
So I tried to set up a TipRack and stick it onto the PlateHolder (works in reality), but that results in:
TypeError: PlateHolder can only store Plate, PlateAdapter or ResourceStack resources, not <class 'pylabrobot.resources.resource_holder.ResourceHolder'
So, if I understand things correctly, I need to set up a separate TipCarrier, assign a TipRack to it, and access that through LiquidHandler lh.deck.get_resource(“tipcarriername”)?
I think I can work with current setup but it would be nice if I could directly stick a TipRack with TipSpots onto a PlateCarrier just like a Plate with Wells? The SPT machine does not have a separate tip carrier, it has stations that take a plate or a tip rack.
Thanks,
w
PS I saw these, they may be related:
